子ども56人+若年成人20人対象、発達に伴う動的バランス制御の変化を評価
東京家政大学は8月28日、「歩行開始時の障害物またぎにおける動的バランス制御」をテーマに、3〜16歳の子どもと若年成人を比較することで、子ども特有のバランス戦略を明らかにしたと発表した。この研究は、同大健康科学部の平田恵介講師、大分大学福祉健康科学部の萬井太規講師らの研究グループによるもの。研究成果は、「Journal of Biomechanics」に掲載されている。
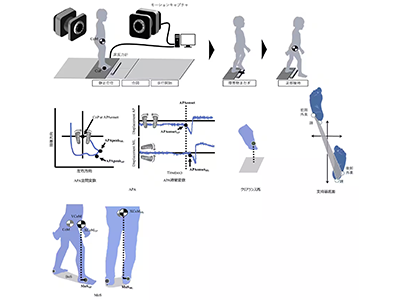
画像はリリースより
(詳細は▼関連リンクからご確認ください)
歩行開始は、静止立位から最初の一歩を踏み出す複雑な動作。安定した姿勢制御が不可欠である。特に障害物をまたぎながら歩行を開始する場面は、通常の歩行開始よりも高い安定性と協調性が求められる。成人に関してはこれまで多くの知見が蓄積されてきたが、子どもにおける発達的特徴や、障害物をまたぎながら歩行を開始する場面における安定戦略の違いは十分に明らかになっていなかった。
そこで今回の研究は、発達に伴う動的バランス制御の変化を科学的に解明することを目的とした。研究には、健常な子ども56人(3~16歳)と若年成人20人が参加した。被験者は、床反力計と三次元動作解析システムを用いて、通常の歩行開始と障害物をまたいだ歩行開始を実施。予測的姿勢調節の開始時点や振幅、さらに動的姿勢安定性を前後・左右方向で解析した。
子どもは未熟な神経運動制御を補うため、「保守的な安定戦略」採用
その結果、子どもは成人よりも予測的姿勢調節の開始が遅く、振幅が大きいことがわかった。障害物をまたいだ歩行開始時、成人は前後方向の動的姿勢安定性を大きく減少させることで効率的に進行方向へ推進する一方、子どもは左右方向の動的な姿勢の安定性をより大きく確保し、安定性を優先する戦略をとった。両群とも障害物条件ではステップ長が延長し、課題特有の補償戦略が見られたが、クリアランス高(足が障害物を越える高さ)には年齢差はないという特徴が明らかになった。これらの結果から、子どもは未熟な神経運動制御を補うために「保守的な安定戦略」を採用していることが示唆された。
子どもが歩行開始課題で示す「安定性優先」姿勢制御戦略を定量的に明らかに
今回の研究は、子どもが障害物を含む歩行開始課題で示す「安定性優先」の姿勢制御戦略を初めて定量的に明らかにしたものである。これは発達段階に応じたバランス評価や、小児に対する転倒予防・リハビリテーションプログラム設計に重要な示唆を与える。今後は、発達障害児や脳性麻痺児を対象とした応用研究や、訓練による予測的姿勢調節改善・動的姿勢安定性強化の効果検証など、臨床的応用への展開が期待される、と研究グループは述べている。
▼関連リンク
・東京家政大学 プレスリリース